Red Hat OpenStack Services on OpenShift is OpenStack—but it’s not just the same old OpenStack you're familiar with. Yes, it's the next version of Red Hat OpenStack Platform that maintains a trusted and stable cloud infrastructure with APIs based on the latest upstream Antelope release. However, there is much more to it! In this article, I show you how Red Hat OpenStack Services on OpenShift is set to redefine your cloud experience.
Red Hat OpenStack Services on OpenShift introduces a modern, cloud-native framework designed to revolutionize how you deploy, manage, monitor, and update your cloud infrastructure. It's a well-deserved upgrade, transforming Red Hat OpenStack Platform into an efficient and user-friendly platform for cloud infrastructure as a service.
Red Hat OpenStack Services on OpenShift is deployed on top of Red Hat OpenShift, leveraging it as versatile infrastructure. You can deploy and manage Red Hat OpenStack Services on OpenShift, which is, to an extent, an application running on top of OpenShift.
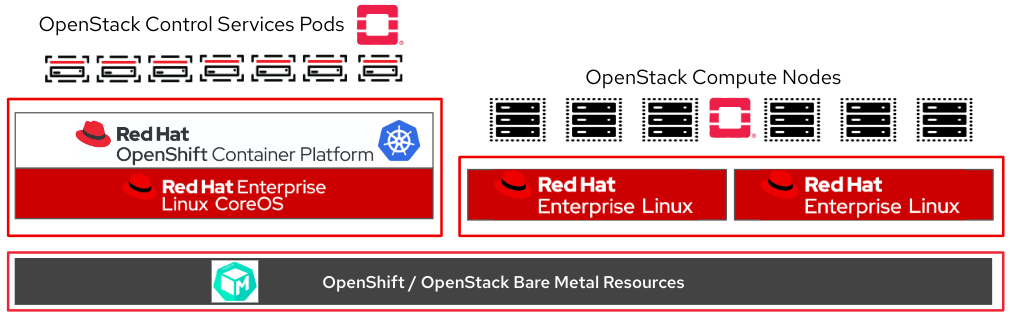
The new Red Hat OpenStack Services on OpenShift architecture has two main components:
- Control plane: Runs on top of OpenShift in pods. Managed by a set of dedicated operators
- External data plane: Multiple sets of virtualization or bare metal (ironic) hosts external to the OpenShift cluster (not managed by Kubernetes or OpenShift)
All the functions required for the creation of the Red Hat OpenStack Services on OpenShift configuration, for both the control plane and data plane, are based on CRD. This means that they are extensions to the Kubernetes API, manifested as Kubernetes operators. Like all Kubernetes constructs, they're configured by declarative YAML.
To enable Red Hat OpenStack Services on OpenShift functions, you create a catalog resource (CR) in OpenShift. For example:
piVersion: operators.coreos.com/v1alpha1
kind: CatalogSource
metadata:
name: cs-redhat-operator-index
namespace: openshift-marketplace
spec:
image: example.com/admin/redhat-operator-index:v4.16 # custom catalog image for relevant operators needed for the RHOSO deployment
---
apiVersion: operators.coreos.com/v1
kind: OperatorGroup
metadata:
name: openstack
namespace: openstack-operators
---
apiVersion: operators.coreos.com/v1alpha1
kind: Subscription
metadata:
name: openstack-operator
namespace: openstack-operators
spec:
name: openstack-operator
channel: alpha
source: openstack-operator-index
sourceNamespace: openstack-operatorsIn just a few minutes, with only that much configuration, you end up with this:
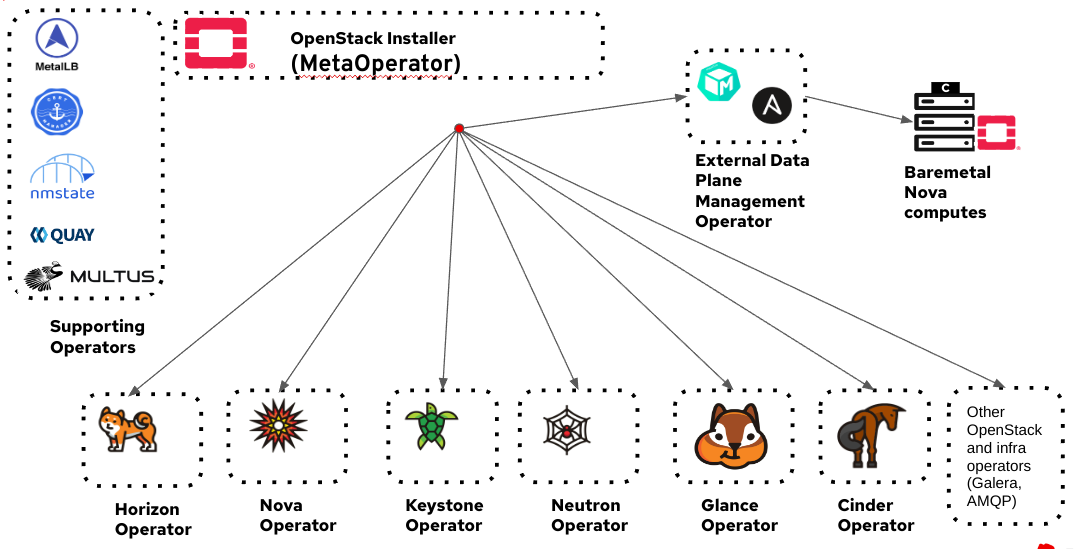
In addition to supporting infrastructure operators supplied by OpenShift (the left side of the diagram), by applying the CR above you get all the components needed to support a Red Hat OpenStack Services on OpenShift environment in minutes.
The control plane and data plane deployments follow a similar pattern, but with more options. With the new architecture, a Red Hat OpenStack Services on OpenShift deployment can be done in minutes, as opposed to hours. That's from the creation of the networking through the creation of the control plane and data plane. Deployment times vary, but that's mostly dependent upon the specifics of the data plane configuration.
Red Hat OpenStack Services on OpenShift has a brand new deployment mechanism, called external data plane management (EDPM), to set up the openstack data plane.
External data plane management
There are several reasons to keep the OpenStack data plane external to OpenShift. For example:
- Enables the path from Red Hat OpenStack Platform (based on TripleO Director) to Red Hat OpenStack Services on OpenShift as an in-place upgrade without the need to migrate workloads
- Maintains the long lifecycle of 5 years for Red Hat OpenStack Services on OpenShift
- Keeps infra churn to a minimum. Even when the OpenShift cluster is periodically upgraded to retain support, the Red Hat OpenStack Services on OpenShift workloads are unaffected
The new data plane architecture is modular with three primary components:
- Data plane node set (DPNS): The main CR, in which you set up the data plane configuration, including:
- Node inventory
- A set of data plane services
- Environment variables, such as container image overrides, Bash commands, subscription registration, NTP data, DNS, and so on
- Network and storage configuration
- Data plane service (DPS): A CR pointing to a specific configuration and an Ansible playbook that executes the configuration on the node inventory you have in the DPNS.
Red Hat ships a set of default services to configure a basic deployment, but additional custom services can be added by the administrator, and included in the DPNS for a given set of nodes. Services are executed in serial. For example, a custom service to install a bunch of agents on the nodes probably needs to be placed after the network configuration takes place. - Deployment: The deployment CR is the "trigger" in which you specify the DPNS you want to group into a deployment. Once created, it triggers all of the DPS in order as Kubernetes jobs running in pods for each DPNS.
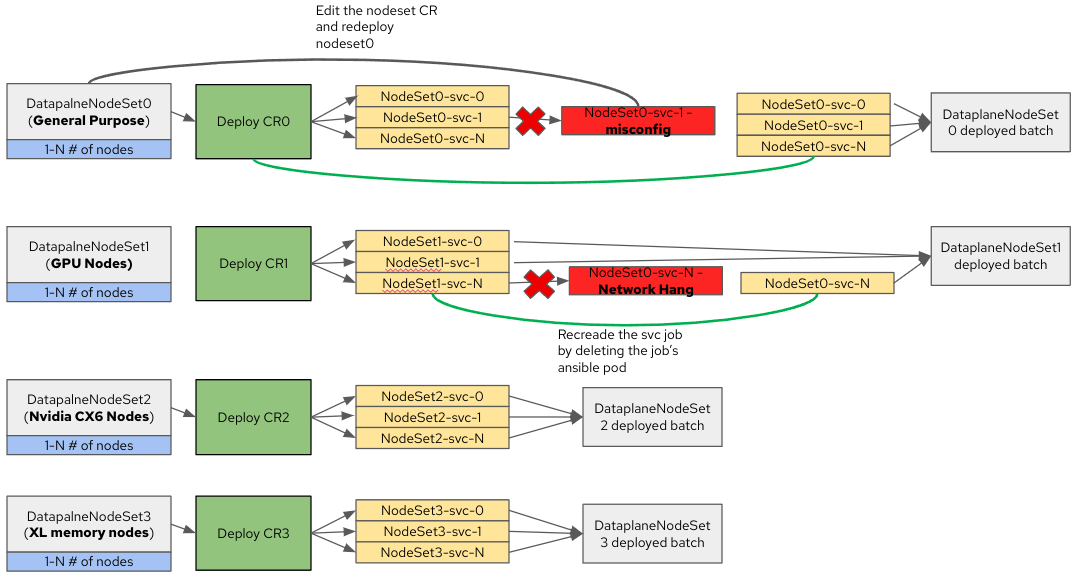
As you see in the diagram above, you can create multiple DPNS, and you can execute them in parallel. This creates a highly scalable deployment mechanism in a true parallel manner.
For example, if you want to deploy 100 nodes, then you can create 10 DPNS and execute them in parallel, as long as you have the resources to support the number of parallel jobs you can scale a deployment linearly.
For example, if your 100 nodes are homogeneous, then by creating the same 10 DPNS you're creating a micro failure domain around each one of the DPNS. As seen in the diagram above, a failure in one of the DPNS deployments is limited to that DPNS and does not cause a cascading failure. Even if several DPNS fail, you still end up with a working environment, and you could tend to the failure cause after the fact.
And that’s not even the best part! For a 10 DPNS homogeneous deployment, the time it takes for a single DPNS to deploy is the same time it takes all 10 to deploy for a true parallel and fully isolated modular deployment. Ready to give it a try? For more info, have a look at:
About the author

More like this
Simplify Red Hat Enterprise Linux provisioning in image builder with new Red Hat Lightspeed security and management integrations
F5 BIG-IP Virtual Edition is now validated for Red Hat OpenShift Virtualization
Get into GitOps | Technically Speaking
Air-gapped Networks | Compiler
Browse by channel

Automation
The latest on IT automation for tech, teams, and environments

Artificial intelligence
Updates on the platforms that free customers to run AI workloads anywhere

Open hybrid cloud
Explore how we build a more flexible future with hybrid cloud

Security
The latest on how we reduce risks across environments and technologies

Edge computing
Updates on the platforms that simplify operations at the edge

Infrastructure
The latest on the world’s leading enterprise Linux platform

Applications
Inside our solutions to the toughest application challenges
Virtualization
The future of enterprise virtualization for your workloads on-premise or across clouds